

テクダイヤの主力製品のひとつであるチップキャパシタは、光通信やマイクロ波の応用製品にご使用いただいております。
今回はマイクロ波の応用製品である、レーダーを使用して距離を測定する仕組みを簡単に説明してみたいと思います。
なぜ電波で距離が測定できるのか – レーダーの仕組みを簡単に説明します

レーダーにはパルス方式、FMCW方式などいくつかの種類がありますが、今回はFMCW方式を説明します。
レーダーから発射された電波は、ターゲットに当たると反射して返ってきます。
電波の進む速度は、光と同じ秒速で約30万キロメートルと非常に高速ですが、電波が行って帰ってくる距離に応じた時間分だけ遅れて返ってきます。やまびこと同じようなものです。
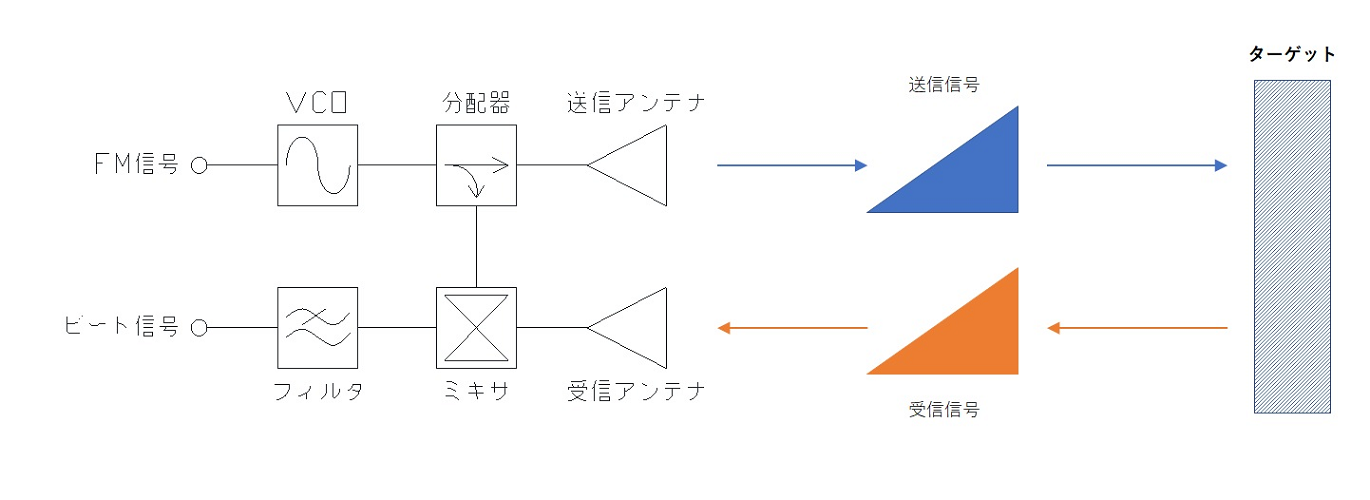
レーダーの簡単な構成図と電波の動きを絵にしてみました。
青い三角形を送信信号、橙の三角形を反射して返ってくる受信信号だと思ってください。
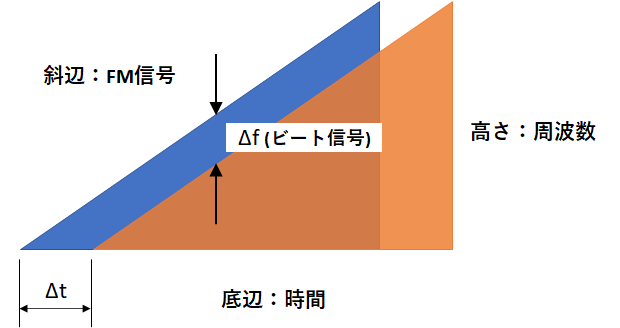
送信信号と受信信号を重ねてみました。
底辺を時間としますとΔtの時間差が発生します。この時間差がわかれば距離がわかることになります。
そして高さを周波数としますと、時間差の発生にともない周波数にもΔfの差が生じます。
FMCW方式では、時間差を求めるのに周波数の差Δfを観測しています。
(Δfのことをレーダーではビート信号といっています)
なお、FMCWとはFrequency Modulation Continuous Wave(周波数変調された連続波)という意味ですので、時間とともに周波数が変化している三角形の斜辺がFM信号を表しています。
理屈がわかれば、なるほどな、となるのですが、初めにこの方式を考えた人はすごいなと思います。
一緒にレーダーの製品開発をした恩師とそんな話をしたことを思い出した2021年のはじめでした。
今年もよろしくお願いいたします。
サカ